

 Выбор системы электропривода кранового механизма в значительной степени определяется требованиями к его механическим характеристикам, которые изменяются в зависимости от рода технологических операций, выполняемых краном. Например, высокая точность монтажных операций, выполняемых с помощью крана, требует от характеристик электроприводов большой жесткости при значительном диапазоне регулирования, в то время как для магнитных кранов, транспортирующих скрап, стружки и т.д., указанные требования не играют столь существенной роли.
Выбор системы электропривода кранового механизма в значительной степени определяется требованиями к его механическим характеристикам, которые изменяются в зависимости от рода технологических операций, выполняемых краном. Например, высокая точность монтажных операций, выполняемых с помощью крана, требует от характеристик электроприводов большой жесткости при значительном диапазоне регулирования, в то время как для магнитных кранов, транспортирующих скрап, стружки и т.д., указанные требования не играют столь существенной роли.
В большинстве случаев для крановых механизмов подъема обобщенные характеристики электропривода можно привести к изображенным на рис. 1 и 2.
Каждая из них имеет определенное назначение:
-
Характеристики 1 и 2 служат для подъема и опускания грузов с высокой скоростью;
-
характеристика 3 и ей подобные необходимы для плавного пуска двигателя при реостатном регулировании, а иногда служат для получения промежуточных скоростей движения грузов;
-
жесткая характеристика 4 в некоторых случаях необходима для доводки грузов до определенного уровня при его подъеме;
-
характеристика 5 позволяет осуществить спуск легких и тяжелых грузов с малой скоростью в тормозном режиме (квадрант IV), а также спуск легких грузов и пустого крюка при необходимости использования силового режима работы (квадрант III);
-
характеристика 6 необходима для механизмов, работающих с возможной резкой перегрузкой, например для грейферов.
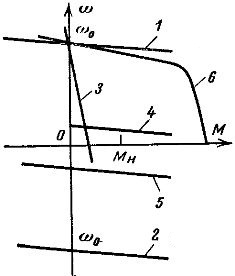
Рис. 1. Механические характеристики электроприводов крановых механизмов.
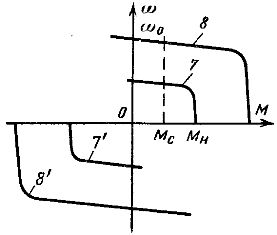
Рис. 2. Механические характеристики электроприводов крановых механизмов с ограничением момента.
Следует обратить внимание на то, что в ряде случаев, особенно для механизмов передвижения, основным, требованием к механическим характеристикам электропривода является поддержание постоянства ускорения при пуске двигателя. Такой режим работы может быть получен, например, при наличии характеристик, приведенных на рис. 2. Малые скорости движения при моменте на валу, равном Мс, и малом ускорении обеспечиваются характеристиками 7 и 7', а повышенные скорости и ускорения — характеристиками 8 и 8'.
Приведенные графики (рис. 1) позволяют судить о том, какая система электропривода должна быть выбрана, если необходим определенный набор характеристик. Очевидным, например, является то, что характеристики 1, 2, 3 могут быть получены от обычного асинхронного двигателя с фазным ротором при реостатном регулировании в цепи ротора.
Более сложным будет электропривод, если необходимо иметь характеристики 1, 2, 3, 5. В этом случае можно использовать асинхронный двигатель с фазным ротором и дросселями, насыщения или тиристорным регулятором напряжения в цепи статора, асинхронный двигатель с фазным ротором и вихревым генератором на валу. Приведенные характеристики могут быть получены и от электроприводов с двигателями постоянного тока.
Выбор системы электропривода нельзя закончить, рассмотрев только возможность получения от нее определенных механических характеристик. Необходимо также оценить ее динамические качества, экономические показатели, надежность и простоту обслуживания.
Вместе с тем следует отметить, что общее изображение характеристик, необходимых для крановых механизмов (рис. 1), не дает полного представления о требованиях к электроприводу кранов. Для того, чтобы полностью представить, каковы требования к электроприводу при наличии характеристик 4 и 5, необходимо знать минимальную скорость при номинальной нагрузке и жесткость характеристик либо диапазон регулирования и необходимый перегрузочный момент при минимальной скорости движения.
При уточнении приведенных показателей следует вновь обратиться к технологическим требованиям. Рассматривая жесткость характеристик, необходимых, например, для механизмов монтажных кранов, в первую очередь следует исходить из точности остановки при выполнении операций спуска и подъема грузов.
Если эта точность составляет при операциях подъема несколько миллиметров, то минимальная скорость подъема груза составит 0,005—0,02 м/с при номинальной скорости около 0,1—0,5 м/с. Отметим, что по приведенным цифрам может быть непосредственно определен необходимый диапазон регулирования. Очень важно поэтому правильно установить требования в отношении точности остановки электропривода.
В некоторых случаях получение механической характеристики определенного вида по существу диктует выбор системы электропривода. Так, характеристики 6, 7, 8 (рис. 1 и 2), необходимые для грейферов, могут быть обеспечены с наилучшими показателями системой управляемый преобразователь — двигатель постоянного тока. Такое решение связано еще и с тем, что для электроприводов грейферных механизмов требуются обычно еще две-три промежуточные пониженные скорости, а это определяет необходимость в дополнительных регулировочных характеристиках.
Существенное значение при создании системы электропривода крановых механизмов имеет возможность получения характеристик, близких по виду к характеристикам 3 и 7 (рис. 1 и 2), которые обеспечивают снижение ударных нагрузок на механизм при выборке слабины канатов и люфтов в передачах.
Для пояснения указанного положения следует заметить, что при работе электропривода подъемного кранового механизма часто возникает такой режим, когда двигатель начинает вращаться, а груз находится в состоянии покоя. После выборки слабины каната и люфтов груз трогается с места рывком, так как двигатель мог к этому времени достигнуть значительной скорости. В этом случае осуществляется так называемый режим подъема с подхватом.
Если при этом характеристика двигателя жесткая, то канат и механизм испытывают ударные нагрузки, которые приводят к их повышенному износу. Кроме того, повышается опасность возникновения раскачивания груза.
При мягких характеристиках по мере натяжения канатов и выборки люфтов момент, развиваемый двигателем, растет, а скорость его падает. Поэтому при начале движения груза удары на механическое оборудование значительно снижаются. В меньшей степени вследствие проявления только наличия люфтов снижение ударов при мягкой начальной характеристике наблюдается также и на механизмах передвижения.