

Слово «тахогенератор» происходит от двух слов — от греческого «тахос», означающего «быстрый» и от латинского «генератор». Тахогенератор представляет собой измерительную электрическую микромашину переменного или постоянного тока, которая монтируется на вал оборудования, и преобразует текущее значение частоты вращения вала в электрический сигнал, определенный параметр которого несет информацию о частоте вращения.
Таким параметром может выступать величина генерируемой ЭДС или значение частоты сигнала. Выходной сигнал с тахогенератора может подаваться на средство визуального отображения (например на дисплей) или на устройство автоматического управления частотой вращения вала, на котором работает данный тахогенератор.
Тахогенераторы бывают нескольких типов, в зависимости от вида сигнала, генерируемого на выходе: с сигналом переменного напряжения или тока (асинхронные или синхронные тахогенераторы), либо с сигналом постоянного тока.

Тахогенератор постоянного тока
Тахогенератор постоянного тока представляет собой коллекторную машину с возбуждением либо от постоянных магнитов (встречаются чаще), либо от обмотки возбуждения (встречаются реже), располагаемых на ее статоре. Измерительная ЭДС наводится на обмотку ротора тахогенератора, и оказывается прямо пропорциональна угловой скорости вращения ротора, по сути — скорости изменения магнитного потока, в точном соответствии с законом электромагнитной индукции.
Выходной сигнал — напряжение, величина которого также прямо пропорциональна угловой скорости вращения ротора — снимается через щетки с коллектора. Поскольку в работе участвуют коллектор и щетки, такой агрегат подвержен более скорому износу, чем тахогенератор переменного тока. Проблема еще и в том, что щеточно-коллекторный узел в процессе своей работы порождает импульсные помехи в выходном сигнале такого тахогенератора.

Так или иначе, выходным сигналом у тахогенератора постоянного тока является напряжение, что создает трудности с точным преобразованием напряжение-скорость, ведь магнитный поток подмагничивания зависит от температуры магнитов, от электрического сопротивления в месте контакта щеток с коллектором (которое со временем изменяется), наконец - от размагничивания постоянных магнитов с течением времени.
Тем не менее, в некоторых случаях тахогенераторы постоянного тока оказываются удобны формой представления выходного сигнала, а также закономерным явлением смены полярности данного сигнала в соответствии с изменением направления вращения вала.
Тахогенераторы постоянного тока характеризуются «коэффициентом преобразования» St, который выражает отношение снимаемого напряжения Uout к соответствующей данному напряжению частоте вращения Frot. Этот параметр дается в технической документации на тахогенератор, и измеряется в милливольтах, умноженных на обороты в минуту. Зная данный параметр и выходное напряжение с тахогенератора, можно вычислить текущую частоту по формуле:
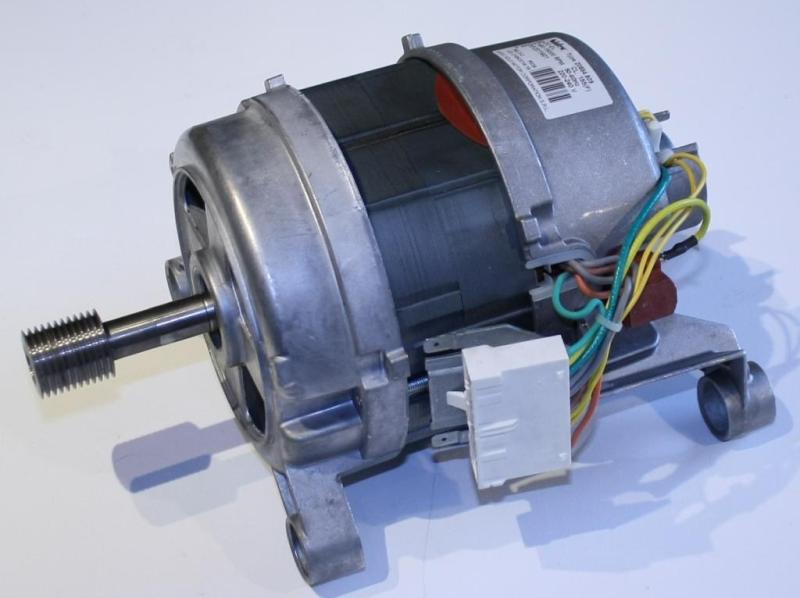
Электродвигатель со встроенным тахогенератором:
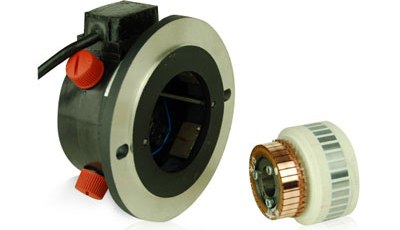
Асинхронный тахогенератор переменного тока
Асинхронные тахогенераторы переменного тока похожи по устройству на асинхронные двигатели с короткозамкнутым ротором. Ротор здесь изготавливается в виде полого цилиндра (обычно медного или алюминиевого), а статор содержит две обмотки, расположенные под прямым углом друг к другу. Одна из обмоток статора — обмотка возбуждения, вторая — выходная. На обмотку возбуждения подается переменный ток с определенной амплитудой и частотой, а выходная обмотка присоединяется к измерительному прибору.
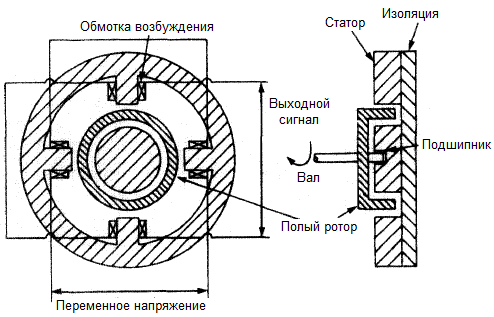
Когда короткозамкнутый ротор вращается, он периодически нарушает изначальную ортогональность магнитных потоков двух обмоток, в результате искажения картины магнитных полей, в выходной обмотке периодически наводится ЭДС. Если же ротор неподвижен, то магнитный поток обмотки возбуждения не искажается, и в выходной обмотке ЭДС не наводится. Здесь величина генерируемой ЭДС пропорциональна частоте вращения вала.
Поскольку подаваемый на обмотку возбуждения ток имеет собственную частоту, отличную от частоты вращения вала, такой тахогенератор именуется асинхронным. Кроме прочего, данная конструкция позволяет по фазе выходного сигнала судить о направлении вращения ротора, - при смене направления вращения фаза переворачивается.
Синхронный тахогенератор переменного тока
Синхронные тахогенераторы представляют собой бесколлекторные машины переменного тока. Намагниченность ротора создается постоянным магнитом, на статоре же присутствуют одна или более обмоток. В данном случае и амплитуда выходного сигнала, и его частота, - будут пропорциональны частоте вращения вала. Поэтому данные о скорости можно измерять как по значению амплитуды (детектирование по амплитуде), так и непосредственно по частоте (детектирование по частоте). Однако направление вращения по выходному сигналу синхронного тахогенератора не определить.
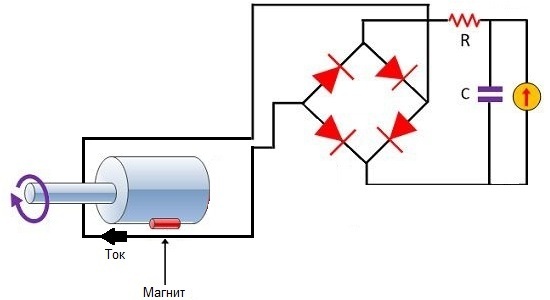
Ротор синхронного тахогенератора переменного тока может быть выполнен в виде многополюсного магнита, и на один оборот вала давать в выходном сигнале несколько импульсов подряд. Такие тахогенераторы, наравне с асинхронными, отличаются более длительным сроком службы, поскольку в них нет щеточно-коллекторного узла, склонного к механическому износу.
Детектирование по частоте
Поскольку у синхронного тахогенератора частота на выходе от температуры и других факторов не зависит, то измерения частоты с ним получаются более точными. Вычисление осуществляется очень просто, достаточно знать количество пар полюсов p на роторе:
 Но есть и нюанс. Чтобы точность вычислений получилось достаточно высокой, необходимо затратить время, за которое теоретически скорость может уже измениться, а это значит, что пока импульсы считаются, нарастает погрешность измерения, что вредно.
Но есть и нюанс. Чтобы точность вычислений получилось достаточно высокой, необходимо затратить время, за которое теоретически скорость может уже измениться, а это значит, что пока импульсы считаются, нарастает погрешность измерения, что вредно.
Дабы погрешность при измерении снизить, ротор делают многополюсным, чтобы вычисления можно было осуществить быстрее, тогда и реакция регулирующей системы может последовать более скоро. Для одного полюса частота вычисляется по следующей формуле:
где N - количество считанных импульсов, Т - период считывания импульсов
У синхронного тахогенератора амплитуда сигнала изменяется в зависимости от скорости, поэтому при проектировании выходного частотного детектора важно учесть весь возможный диапазон амплитуд выходных напряжений тахогенератора.
Детектирование по амплитуде
При амплитудном способе определения частоты схема частотного детектора будет проще, но здесь важно учесть влияние таких факторов, как: температура, изменение немагнитного зазора и т. д. Чем выше частота — тем больше амплитуда выходного сигнала, поэтому схема детектора обычно представляет собой выпрямитель и НЧ-фильтр, где коэффициент преобразования, измеряемый в мВ*об/мин, позволяет определить частоту по следующей формуле:
Кроме рассмотренных в данной статье традиционных типов тахогенераторов, в современной технике также применяются импульсные датчики на базе оптронов, датчиков Холла и т. д. Достоинство тахогенераторов заключается в том, что в паре с детектором они не требуют никаких дополнительных источников питания. К недостаткам традиционных тахогенераторов машинного типа относятся: плохая чувствительность на низких скоростях и вносимый тормозящий момент.
Андрей Повный
