

 Шаговым двигателем называют электромеханическое устройство, преобразующее электрические сигналы в дискретные угловые перемещения вала. Применение шаговых двигателей позволяет рабочим органам машин совершать строго дозированные перемещения с фиксацией своего положения в конце движения.
Шаговым двигателем называют электромеханическое устройство, преобразующее электрические сигналы в дискретные угловые перемещения вала. Применение шаговых двигателей позволяет рабочим органам машин совершать строго дозированные перемещения с фиксацией своего положения в конце движения.
Шаговые двигатели являются приводными исполнительными механизмами, обеспечивающими фиксированные угловые перемещения (шаги). Каждое изменение угла поворота ротора - это реакция шагового двигателя на входной импульс.
Дискретный электропривод с шаговым двигателем естественным образом сочетается с цифровыми управляющими устройствами, что позволяет успешно использовать его в станках с числовым программным управлением, в промышленных роботах и манипуляторах, в часовых механизмах.
Дискретный электропривод может быть реализован также с помощью серийных асинхронных электродвигателей, которые за счет специального управления могут работать в шаговом режиме.
 Шаговые двигатели применяются в электроприводах мощностью от долей ватта до нескольких киловатт. Расширение шкалы мощности дискретного электропривода может быть достигнуто при использовании серийных асинхронных электродвигателей, которые за счет соответствующего управления могут работать в шаговом режиме.
Шаговые двигатели применяются в электроприводах мощностью от долей ватта до нескольких киловатт. Расширение шкалы мощности дискретного электропривода может быть достигнуто при использовании серийных асинхронных электродвигателей, которые за счет соответствующего управления могут работать в шаговом режиме.
Принцип действия шаговых двигателей всех типов состоит в следующем. С помощью электронного коммутатора вырабатываются импульсы напряжения, которые подаются на обмотки управления, расположенные на статоре шагового двигателя.
В зависимости от последовательности возбуждения обмоток управления происходит то или иное дискретное изменение магнитного поля в рабочем зазоре двигателя. При угловом перемещении оси магнитного поля обмоток управления шагового двигателя его ротор дискретно поворачивается вслед за магнитным полем. Закон поворота ротора определяется последовательностью, скважностью и частотой управляющих импульсов, а также типом и конструктивными параметрами шагового двигателя.
Принцип действия шагового двигателя (получение дискретного перемещения ротора) рассмотрим на примере простейшей схемы двухфазного шагового двигателя (рис. 1).
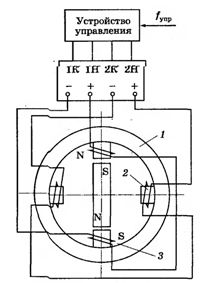
Рис. 1. Упрощенная схема шагового двигателя с активным ротором
Шаговый двигатель имеет на статоре две пары явно выраженных полюсов, на которых Находятся обмотки возбуждения (управления): обмотка 3 с выводами 1Н - 1К и обмотка 2 с выводами 2Н - 2К. Каждая обмотка состоит из двух частей, находящихся на противоположных полюсах статора 1 ШД.
Ротор в рассматриваемой схеме представляет собой двухполюсный постоянный магнит. Обмотки питаются импульсами от устройства управления, которое преобразует одноканальную последовательность входных импульсов управления fупр, в многоканальную (по числу фаз шагового двигателя).
 Рассмотрим работу шагового двигателя, предположив, что в начальный момент напряжение подано на обмотку 3. Ток в этой обмотке вызовет намагничивание вертикально расположенных полюсов N и 8. В результате взаимодействия магнитного поля с постоянным магнитом ротора последний займет равновесное положение, в котором оси магнитных полей статора и ротора совпадают.
Рассмотрим работу шагового двигателя, предположив, что в начальный момент напряжение подано на обмотку 3. Ток в этой обмотке вызовет намагничивание вертикально расположенных полюсов N и 8. В результате взаимодействия магнитного поля с постоянным магнитом ротора последний займет равновесное положение, в котором оси магнитных полей статора и ротора совпадают.
Положение будет устойчивым, поскольку на ротор действует синхронизирующий момент, стремящийся возвратить ротор в положение равновесия: М = Мmах х sinα,
где Мmах - максимальный момент, α - угол между осями магнитных полей статора и ротора.
При переключении блоком управления напряжения с обмотки 3 на обмотку 2 образуется магнитное поле с горизонтальными полюсами, т.е. магнитное поле статора совершает дискретный поворот на четверть окружности статора. При этом между осями статора и ротора появится угол рассогласования α = 90° и на ротор будет действовать максимальный вращающий момент Мшах. Ротор повернется на угол α = 90° и займет новое устойчивое положение. Таким образом, вслед за шаговым перемещением поля статора совершает шаговое перемещение ротор двигателя.
 Основной режим работы шагового двигателя - динамический. Шаговые двигатели в отличие от синхронных рассчитаны на вхождение в синхронизм из состояния покоя и принудительное электрическое торможение. Благодаря этому в шаговом электроприводе обеспечивается пуск, торможение, реверс и переход с одной частоты управляющих импульсов на другую.
Основной режим работы шагового двигателя - динамический. Шаговые двигатели в отличие от синхронных рассчитаны на вхождение в синхронизм из состояния покоя и принудительное электрическое торможение. Благодаря этому в шаговом электроприводе обеспечивается пуск, торможение, реверс и переход с одной частоты управляющих импульсов на другую.
Пуск шагового двигателя осуществляется скачкообразным или постепенным увеличением частоты входного сигнала от нуля до рабочей, торможение - снижением ее до нуля, а реверс - изменением последовательности коммутации обмоток шагового двигателя.
Шаговые двигатели характеризуются следующими параметрами: число фаз (обмоток управления) и схема их соединения, тип шагового двигателя (с активным или пассивным ротором), одиночный шаг ротора (угол поворота ротора при единичном импульсе), номинальное напряжение питания, максимальный статический хронизирующий момент, номинальный вращающий момент, момент инерции ротора, частота приемистости.
Шаговые двигатели бывают однофазными, двухфазными и многофазными с активным или пассивным ротором. Управление шаговым двигателем обеспечивается электронным блоком управления. Пример схемы управления шаговым двигателем приведен на рисунке 2.
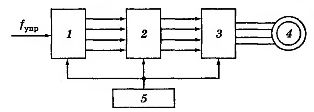
Рис. 2. Функциональная схема разомкнутого электропривода с шаговым двигателем
Сигнал управления fупр в виде импульсов напряжения поступает на вход блока 1, преобразующего последовательность импульсов, например в четырехфазную систему однополярных импульсов (в соответствии с числом фаз шагового двигателя).
Блок 2 формирует эти импульсы по длительности и амплитуде, необходимым для нормальной работы коммутатора 3, к выходам которого подключены обмотки шагового двигателя 4. Коммутатор и остальные блоки питаются от источника постоянного тока 5.
При повышенных требованиях к качеству дискретного привода применяют замкнутую схему шагового электропривода (рис. 3), которая кроме шагового двигателя включает преобразователь П, коммутатор К и датчик шага ДШ. В таком дискретном приводе информация о действительном положении вала рабочего механизма РМ и скорости шагового двигателя поступает на вход автоматического регулятора, который обеспечивает заданный характер движения привода.
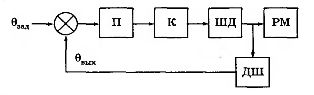
Рис. 3. Функциональная схема замкнутого дискретного привода
В современных системах дискретного привода применяются микропроцессорные средства управления. Область применения приводов с шаговыми двигателями постоянно расширяется. Их использование перспективно в сварочных автоматах, приборах времени, лентопротяжных и регистрирующих механизмах, системах управления топливоподачей двигателей внутреннего сгорания.
Преимущества шаговых двигателей:
-
высокая точность, даже в разомкнутой структуре управления, т. е. без датчика угла поворота;
-
естественная интеграция с приложениями цифрового управления;
-
отсутствие механических коммутаторов, которые часто создают проблемы в двигателях других типов.
Недостатки шаговых двигателей:
-
малый вращающий момент но сравнению с двигателями приводов непрерывного типа;
-
ограниченная скорость;
-
высокий уровень вибрации из-за скачкообразного движения;
-
большие ошибки и колебания при потере импульсов в системах с разомкнутым контуром управления.
Преимущества шаговых двигателей намного превосходят их недостатки, поэтому они часто применяются в тех случаях, когда достаточно небольшой мощности приводных устройств.
В статье использованы материалы книги Дайнеко В.А., Ковалинский А.И. Электрооборудование сельскохозяйственных предприятий.