

Электродвигатели преобразуют электрическую энергию в энергию механическую, а что касается шаговых двигателей, то они преобразуют энергию электрических импульсов во вращательные движения ротора. Движение, порождаемое действием каждого импульса, начинается и повторяется с высокой точностью, благодаря чему шаровые двигатели являются эффективными приводами для устройств, требующих точного позиционирования.
Шаговые двигатели на постоянных магнитах включают в себя: ротор с постоянными магнитами, обмотки и магнитопровод статора. Возбуждаемые обмотки создают магнитные северный и южный полюса, как показано на рисунке. Движущееся магнитное поле статора вынуждает ротор все время выравниваться вслед за ним. Это вращающееся магнитное поле можно настраивать, управляя последовательным возбуждением катушек статора, приводящих ротор во вращение.
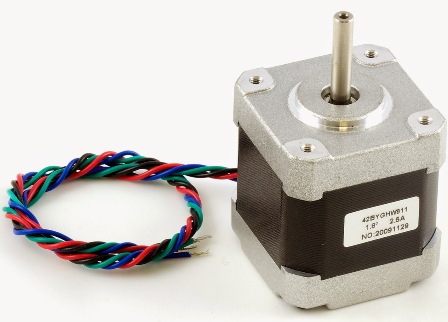
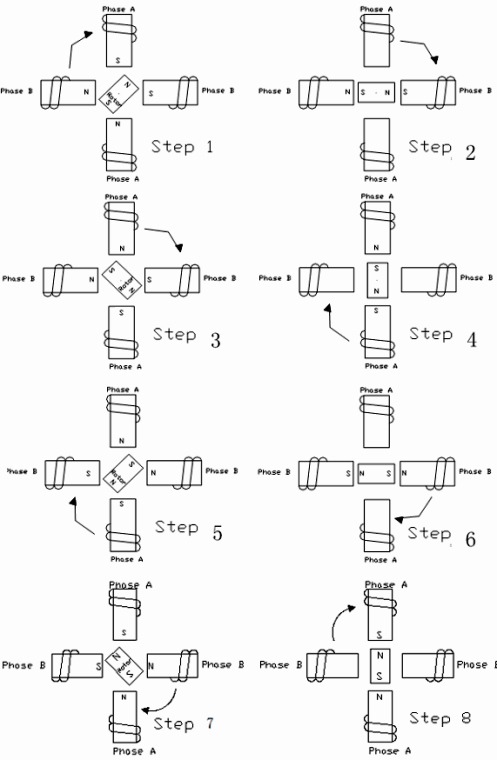
На рисунке показана схема типичного способа возбуждения двухфазного мотора. В фазе А две катушки статора возбуждены, и это заставляет ротор магнитно притянуться и зафиксироваться, поскольку противоположные магнитные полюса взаимно притягиваются. Когда обмотки фазы А выключается, включается обмотки фазы В, ротор поворачивается по часовой стрелке (англ. CW - по часовой стрелке, CCW – против часовой стрелки) на 90°.
Далее фаза В отключается, и фаза А включается, но полюса располагаются теперь противоположно тому, как было в самом начале. Это приводит к следующему повороту на 90°. Далее фаза А выключается, включается фаза В в обратной полярности.. Повторение этих действий приводит ротор во вращение по часовой стрелке шагами по 90°.
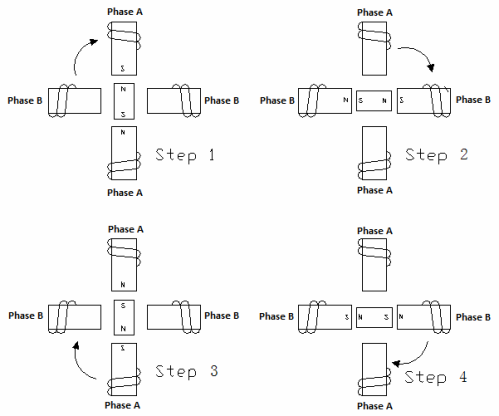
Шаговое управление, показанное на рисунке, называется управлением с одной активной фазой. Более приемлемый способ шагового управления — управление с двумя активными фазами, когда обе фазы мотора всегда включены, однако полярность в одной из них меняется, как показано на рисунке.
Такое управление приводит к движению ротора шагового двигателя, при котором он выравнивается при каждом шаге в центре образующихся северного и южного полюсов, между выступами магнитопровода. Поскольку обе фазы всегда включены, то данный метод управления дает на 41,4% больший вращающий момент, чем управление с одной активной фазой, но требует вдвое больше электрической мощности.
Полушаг
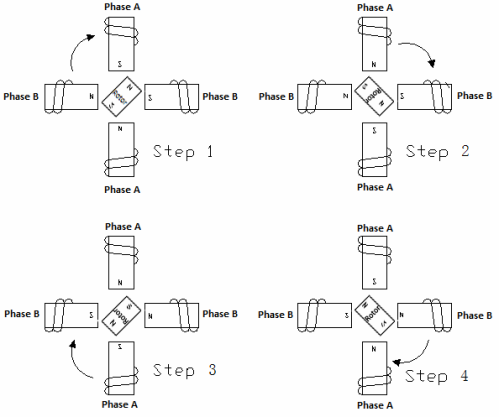
Шаговый двигатель может быть и «полушаговым», тогда добавляется стадия выключения в процессе перехода между фазами. Это делит угол шага напополам. Например, вместо 90° шаговый мотор может делать повороты по 45° на каждом «полушаге», как показано на рисунке.
Но полушаговый режим вносит потери во вращающий момент на 15-30%, по сравнению с шаговым управлением с двумя активными фазами, поскольку одна из обмоток не активна во время половины шага, и это в итоге потеря электромагнитной силы, действующей на ротор, то есть чистая потеря вращающего момента.
Двухполюсная обмотка
Двухфазное шаговое управление подразумевает наличие двухполюсной обмотки на статоре. Каждая фаза имеет свою обмотку, и при реверсе тока через обмотки меняются и электромагнитные полярности. Выходной каскад типичного двухфазного драйвера изображен на рисунке. Схема управления приведена в таблице. Видно, как просто меняя направление тока через обмотки, можно менять и магнитную полярность в фазах.
Однополюсная обмотка
Другой типичный вид обмотки — однополюсная обмотка. Здесь обмотки разделены каждая на две части, и когда одна часть обмотки возбуждается — создается северный полюс, когда другая часть возбуждается — возникает южный полюс. Такое решение называется однополюсной обмоткой, так как электрическая полярность ответственная за ток никогда не меняется. Шаги управления показаны на рисунке.
Такой дизайн позволяет использовать более простой электронный блок. Однако, здесь почти 30% вращающего момента теряется, в сравнении с двухполюсной обмоткой, потому что в катушках в два раза меньше провода, чем в двухполюсной обмотке.
Другие углы шага
Для получения меньших углов шага необходимо наличие большего количества полюсов как на роторе, так и нас статоре. Ротор для 7.5° имеет 12 пар полюсов, а магнитопровод статора обладает 12 выступами. Два выступа на катушку, и две обмотки.
Таким образом получается 48 полюсов для каждого шага по 7.5°. На рисунке можно рассмотреть 4 полюсных выступа в разрезе. Конечно, можно комбинировать шаги для достижения больших перемещений, например шесть шагов по 7.5° приведут к повороту ротора на 45°.
Точность
Точность шаговых двигателей составляет 6-7% на шаг (без накопления). Шаговый двигатель с шагом в 7.5° будет всегда в пределах 0,5° от теоретически предсказанного положения, независимо от того, сколько шагов уже сделано. Ошибка не будут накапливаться, потому что механически каждые 360° повторяются пошагово. Без нагрузки физическое положение полюсов статора и ротора относительно друг друга все время будет одним и тем же.
Резонанс
Шаговые двигатели обладают собственной резонансной частотой, поскольку являются системами подобными грузу на пружине. Когда частота шагов совпадает с собственной резонансной частотой двигателя, можно слышать изменение шума, создаваемого двигателем, кроме того усиливается вибрация.
Точка резонанса зависит от применения двигателя, от его нагрузки, но обычно резонансная частота лежит в диапазоне от 70 до 120 шагов в секунду. В худшем случае двигатель утратит точность управления, если войдет в резонанс.
Простой способ избежать проблем, связанных с резонансом в системе, — изменить частоту шагов в сторону от точки резонанса. В режиме полушага или микрошага масштаб проблемы резонанса уменьшается, поскольку с увеличением скорости точка резонанса остается все дальше позади.
Вращающий момент
Вращающий момент шагового двигателя является функцией от: скорости шага, тока обмотки статора, типа двигателя. Мощность конкретного шагового двигателя также связана с этими тремя факторами. Вращающий момент шагового двигателя представляет собой сумму момента трения и момента инерции.
Момент трения в граммах на сантиметр — это сила, необходимая для перемещения груза весом в определенное количество грамм при плече рычага длиной в 1 см. Важно отметить, что с увеличением скорости шага двигателя возрастает противо-ЭДС в моторе, то есть генерируемое двигателем напряжение. Это приводит к ограничению тока в обмотках статора и к снижению вращающего момента.