

Современные бесколлекторные двигатели постоянного тока - это электродвигатели, которые не имеют щеток и коллектора для коммутации тока в обмотках. Вместо этого они используют специальную электронику для управления током в зависимости от положения ротора, на котором закреплены постоянные магниты.
Ключевым отличием от коллекторных аналогов является расположение обмоток на статоре, что устраняет необходимость в механическом коммутаторе. Для определения положения ротора используются датчики Холла или бессенсорные методы.
Бесколлекторные двигатели имеют ряд преимуществ перед коллекторными, таких как высокий КПД, низкий уровень шума, длительный срок службы, возможность работы при высоких скоростях и моментах. Их развитие связано с совершенствованием электронных систем управления и применением новых магнитных материалов.
Бесколлекторные двигатели применяются в различных областях, таких как авиация, автомобильная промышленность, робототехника, медицина, бытовая техника и другие.
Благодаря существенному прогрессу в области полупроводниковой электроники и в технологии создания мощных неодимовых магнитов, широкое распространение получили сегодня бесколлекторные двигатели постоянного тока. Они применяются в стиральных машинах, пылесосах, вентиляторах, дронах и т. д.
И хотя идея касательно принципа работы бесколлекторного двигателя высказывалась еще в начале 19 века, она ждала своего часа до начала полупроводниковой эры, когда технологии стали готовы к практической реализации этой интересной и эффективной концепции, позволившей бесколлекторным двигателям постоянного тока шагать так широко, как это происходит сегодня.
В англоязычной версии двигатели данного типа именуются BLDC motor – Brushless Direct Current Motor - бесщеточный двигатель постоянного тока. Ротор двигателя содержит постоянные магниты, а рабочие обмотки располагаются на статоре, то есть устройство BLDC двигателя полностью противоположно тому, как это имеет место в классическом коллекторном двигателе. Управляется BLDC двигатель электронным регулятором, который называют ESC - Electronic speed controller — электронный регулятор хода.
Электронный регулятор хода и высокий КПД
Электронный регулятор хода (контроллер) позволяет плавно варьировать электрическую мощность, подаваемую на бесколлекторный электродвигатель.
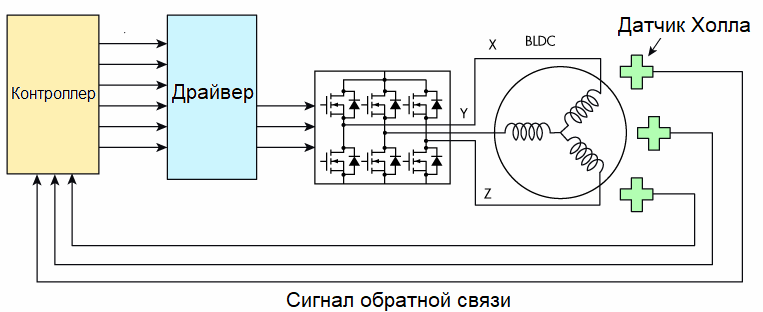
Электронный регулятор последовательно коммутирует обмотки статора, создавая вращающееся магнитное поле. Это поле взаимодействует с магнитами ротора, приводя его во вращение. Точность управления обеспечивается обратной связью от датчиков положения.
В отличие от ранних, более простых версий резистивных регуляторов хода, которые просто ограничивали мощность путем включения в цепь последовательно с двигателем активной нагрузки, превращающей избыточную мощность в тепло, электронный регулятор хода позволяет получить значительно более высокий КПД, не расходуя подводимую электрическую энергию на бесполезный нагрев.
Бесколлекторный двигатель постоянного тока можно классифицировать как самосинхронизируемый синхронный двигатель, в котором полностью исключен искрящий узел, требующий регулярного обслуживания - коллектор. Функцию коллектора несет на себе электроника, благодаря чему вся конструкция изделия сильно упрощается и становится компактнее.
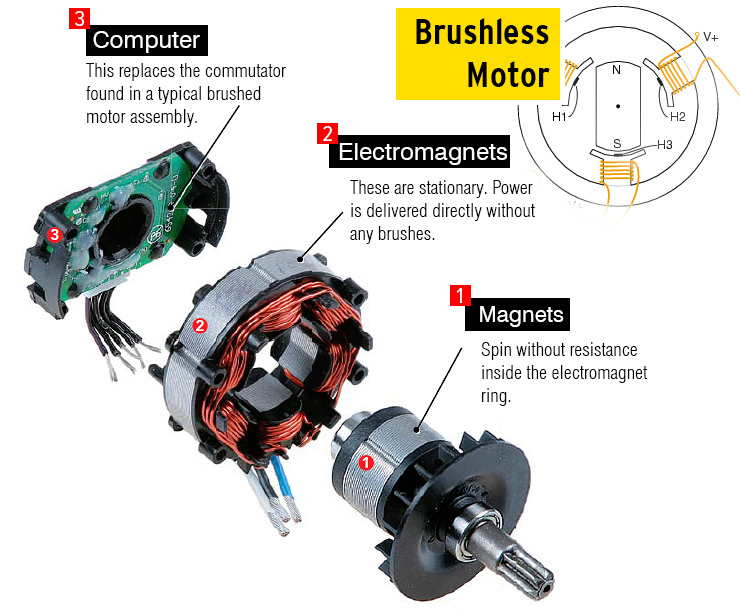
Щетки заменены, по сути, на электронные ключи, потери в которых сильно меньше чем были бы при механической коммутации. Мощные неодимовые магниты на роторе позволяют добиться большего момента на валу. И греется такой двигатель меньше нежели его коллекторный предшественник.
В итоге КПД двигателя получается наилучшим, а показатели мощности на килограмм веса — выше, плюс достаточно широкий диапазон регулировки скорости вращения ротора и практически полное отсутствие генерируемых радиопомех. Конструктивно двигатели данного типа легко адаптируются для эксплуатации в воде и в агрессивных средах.
Электронный блок управления — очень важная и дорогостоящая часть бесколлекторного двигателя постоянного тока, без которой, однако, никак не обойтись. От данного блока двигатель получает питание, параметры которого одновременно влияют и на скорость, и на мощность, которую двигатель будет в состоянии развить под нагрузкой.
Даже если скорость вращения регулировать не нужно, все равно электронный блок управления необходим, ведь он несет на себе не только функцию управления, но также имеет силовую составляющую. Можно сказать, что ESC – это аналог частотного регулятора для асинхронных двигателей переменного тока, специально предназначенный для питания и управления бесколлекторным двигателем постоянного тока.
Современные контроллеры используют 32-битные микроконтроллеры с частотой ШИМ до 50 кГц, поддерживая частоты вращения до 100 000 об/мин. Ключевым трендом стало внедрение AI-алгоритмов для прогнозирования параметров двигателя в реальном времени.
Управление двигателем BLDC
Чтобы понять как происходит управление BLDC двигателем, сначала вспомним как работает коллекторный двигатель. В его основе принцип вращения рамки с током в магнитном поле.
Каждый раз, когда рамка с током повернулась и нашла положение равновесия, коммутатор (щетки прижатые к коллектору) изменяет направление тока через рамку, и рамка движется дальше. Этот процесс повторяется при движении рамки от полюса к полюсу. Только вот в коллекторном двигателе таких рамок много и магнитных полюсов несколько пар, поэтому коллекторно-щеточный узел содержит не два контакта, а много.
Электронный блок управления бесколлекторным двигателем делает то же самое. Он изменяет полярность магнитного поля как только ротор необходимо провернуть дальше из положения равновесия. Только управляющее напряжение подается не на ротор, а на обмотки статора, и делается это при помощи полупроводниковых ключей в нужные моменты времени (фазы ротора).
Очевидно, что электрический ток на обмотки статора бесколлекторного двигателя необходимо подавать в правильные моменты времени, то есть тогда, когда ротор находится в определенном известном положении. Для этого применяется один из следующих методов. Первый — на основе датчика положения ротора, второй — путем измерения ЭДС на одной из обмоток, которая в данный момент не получает питание.
Датчики бывают разными, магнитными и оптическими, наиболее популярны магнитные датчики на основе эффекта Холла. Второй способ (на основе измерения ЭДС) хотя и эффективен, однако он не позволяет осуществлять точное управление на низких скоростях и при старте. А вот датчики Холла обеспечивают возможность более точного управления во всех режимах. В трехфазных BLDC двигателях таких датчиков три штуки.
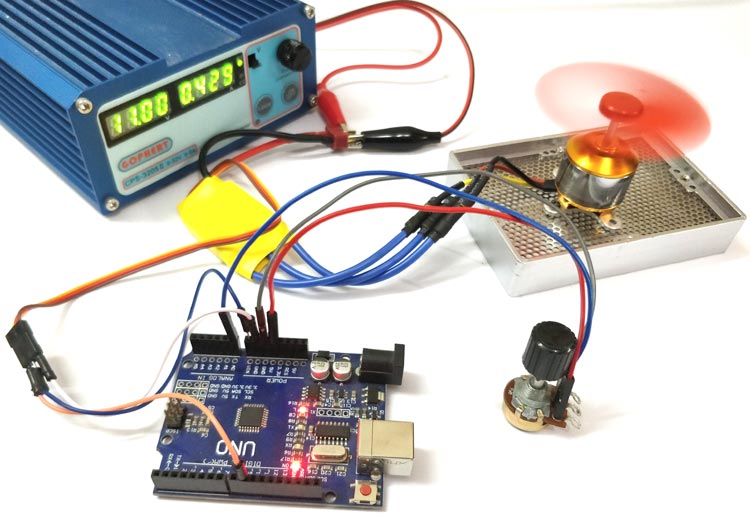
Двигатели без датчиков положения ротора применимы в тех случаях, когда старт двигателя происходит без нагрузки на валу (вентилятор, пропеллер и т. п.). Если же старт происходит под нагрузкой, необходим двигатель с датчиками положения ротора. В том и в другом варианте есть свои плюсы и минусы.
Решение с датчиком оборачивается более удобным управлением, но при выходе из строя хотя бы одного из датчиков, двигатель придется разбирать, к тому же датчики требуют отдельных проводов. В варианте без датчика нет надобности в специальных проводах, но во время старта ротор будет раскачиваться туда-сюда. Если это недопустимо, необходимо ставить в систему датчики.
Ротор и статор, количество фаз
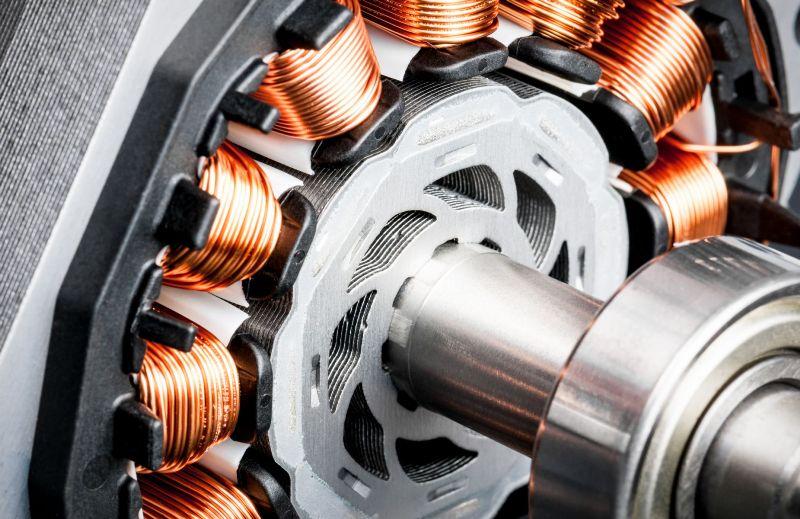
Ротор BLDC двигателя может быть наружным или внутренним, а статор, соответственно, внутренним или наружным. Статор изготавливают из магнитопроводящего материала, с количеством зубцов, которое нацело делится на количество фаз. Ротор может быть изготовлен необязательно из магнитопроводящего материала, но обязательно с жестко зафиксированными на нем магнитами.

Чем сильнее магниты — тем выше доступный вращающий момент. Количество зубцов статора не обязательно должно быть равно количеству магнитов на роторе. Минимальное количество зубцов равно количеству фаз управления.
Большинство современных бесколлекторных двигателей постоянного тока — трехфазные, просто в силу простоты такой конструкции и способа управления ею. Как и в асинхронных двигателях переменного тока, обмотки трех фаз соединяются здесь на статор «треугольником» либо «звездой».
Такие двигатели без датчиков положения ротора имеют 3 питающих провода, а двигатели с датчиками — 8 проводов: дополнительные два провода - для питания датчиков и три — сигнальные выводы датчиков.
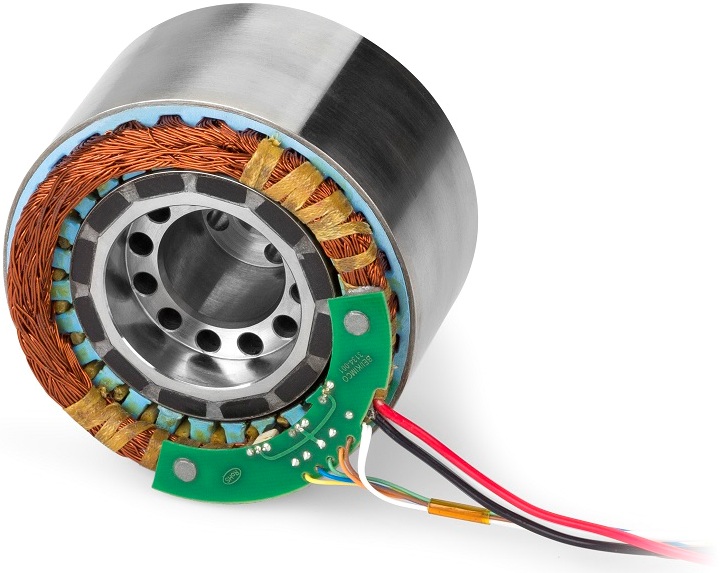 Обмотка статора выполняется изолированным медным проводом так, чтобы сформировать магнитные полюса необходимого количества фаз, равномерно распределенные по окружности ротора. Количество отдельно стоящих полюсов на статоре для каждой фазы выбирается исходя из требуемой скорости вращения двигателя (и вращающего момента).
Обмотка статора выполняется изолированным медным проводом так, чтобы сформировать магнитные полюса необходимого количества фаз, равномерно распределенные по окружности ротора. Количество отдельно стоящих полюсов на статоре для каждой фазы выбирается исходя из требуемой скорости вращения двигателя (и вращающего момента).
Низкооборотные двигатели с наружным ротором делают с большим количеством полюсов (и соответственно зубцов) на каждую фазу, чтобы получить вращение с угловой частотой значительно меньше частоты управляющего тока. Но даже в высокооборотных трехфазных двигателях обычно не применяют количество зубцов меньше 9, так как это обеспечивает равномерное вращение и снижает вибрации. Например, при 9 зубцах (3 на фазу) каждый полюс фазы занимает 120° электрических, что соответствует базовой трехфазной схеме.
Для двигателей с датчиками Холла расположение сенсоров синхронизируется с зубцами статора, что требует точного расчета углового смещения.
Конструкция BLDC-двигателя балансирует между количеством фаз, полюсов и зубцов для достижения целевых характеристик по моменту, скорости и КПД.
Андрей Повный, Филиал БГТУ "Гомельский государственный политехнический колледж"